Guide - Real Time Operating System with their Types
One of the most significant segments that go into the present implanted frameworks is the "RTOS" or "real time operating system," which is liable for everything from planning assignments to empowering elevated level dialects like C and Python.
Anyway, what really matters to a RTOS, and for what reason should installed framework engineers care about it? And you should be know about network operating system as well.
RTOS versus GPOS
To comprehend the RTOS, how about we make a stride back and take a gander at what a "universally useful OS" (GPOS) is. You're presumably effectively acquainted with GPOSes, as they're found on gadgets you utilize each day, similar to your advanced cell and work PC (e.g., Android, Windows, and so on.).
To improve your website traffic with our SEO services! We can helping out to deliver good result.
The "general" by and large reason OS implies the OS must satisfy numerous objectives, for example, giving a decent end-client experience, supporting various kinds of projects and equipment, and giving abilities like customization choices.
GPOS's will in general work working together with processors where each center runs a solitary string of execution at once. Here, the working framework's scheduler chooses which program to run and when, quickly exchanging between each program. This outcomes in the dream of synchronous execution, and ideally gives a decent by and large client experience. Over this current, GPOS's may give extra usefulness, for example, advanced realistic UIs, complex record I/O frameworks, and so forth.
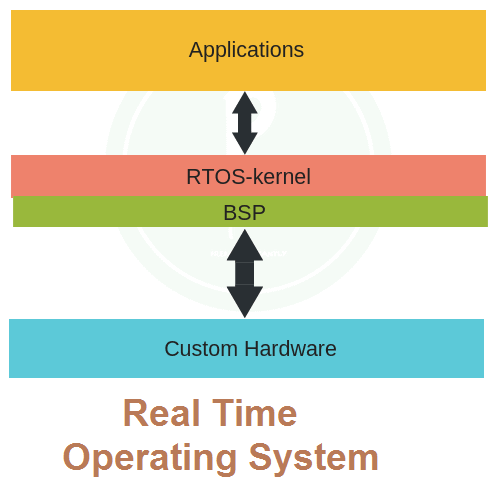
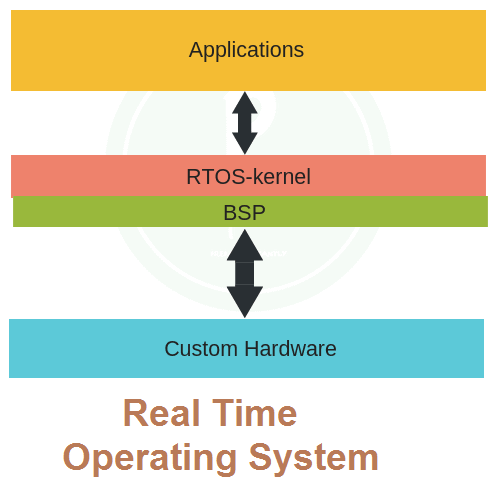
Then again, this types of operating system are intended to give an anticipated execution design and is utilized when preparing must fit in with the time imperatives of a period bound framework (i.e., handling is finished at a specific recurrence or the framework in general will fall flat). All things considered, a RTOS is regularly light weight and little contrasted with a GPOS, and for the most part gives just the usefulness required to run particular sorts of utilizations on explicit equipment. Sometimes, engineers may adjust a current RTOS, diminishing it down to just the usefulness required for their specific application, or potentially modifying its usefulness or execution attributes.
An RTOS can be classified as:
Soft: The RTOS can typically comply with time-compelled time constraints; the pre-emption period is as a rule inside a couple of milliseconds.
Firm: The RTOS has certain time imperatives, which are not severe and may cause undesired yet adequate impacts.
Hard: The RTOS can fulfill timing time constraints deterministically. A Hard RTOS is commonly best for use cases including strategic applications, for example, those found in mechanical technology and automatons. The pre-emption period for a hard RTOS is typically not exactly a couple of microseconds.